


Cas particulier des problèmes plans
Simplification plane
Fondamental : Simplification plane
Si le système étudié admet un plan de symétrie géométrique qui est aussi plan de symétrie pour les actions mécaniques extérieures (symétrie de charge), on dit que le problème est plan.
La simplification plane nous conduit à résoudre un problème dans lequel :
les forces sont contenues dans le plan de symétrie,
les moments sont perpendiculaires au plan de symétrie.

Exemple : Cas d'un véhicule en équilibre
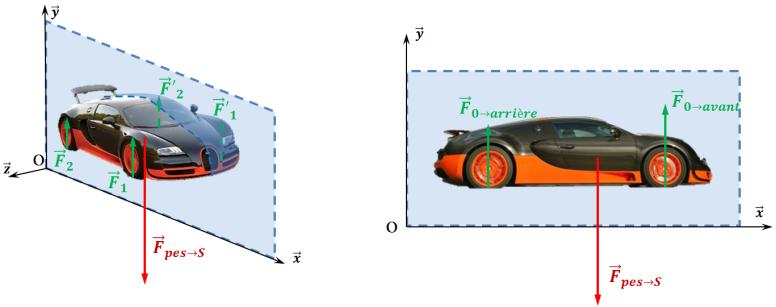
le plan
 est un plan de symétrie géométrique du véhicule,
est un plan de symétrie géométrique du véhicule,
les efforts
 sont symétriques par rapport à ce plan.
sont symétriques par rapport à ce plan.
On peut donc supposer que le problème est plan dans le plan
 et se ramener au cas de la figure de droite. Attention tout de même dans les calculs à tenir compte du fait que les efforts
et se ramener au cas de la figure de droite. Attention tout de même dans les calculs à tenir compte du fait que les efforts
 et
et
 correspondent aux efforts cumulés exercés par le sol respectivement sur les roues avant et arrières :
correspondent aux efforts cumulés exercés par le sol respectivement sur les roues avant et arrières :
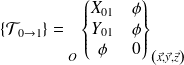
Fondamental : Conséquences
Dans le cas d'un problème plan dans le plan
, tous les torseurs des A.M s'écrivent sous la forme suivante :

Les composantes
 ,
,
 et
et
 peuvent éventuellement être nulles.
peuvent éventuellement être nulles.Les composantes
 ,
,
 et
et
 sont nécessairement nulles du fait du problème plan dans le plan
.
sont nécessairement nulles du fait du problème plan dans le plan
.

Remarque :
L'application du PFS dans le cadre d'un problème plan donne 3 équations à résoudre :
2 équations provenant du Théorème de la Résultante Statique (projection de l'égalité vectorielle sur chacun des 2 axes du plan de la feuille)
1 équation provenant du Théorème du Moment Statique (projection sur l'axe perpendiculaire au plan de la feuille).
En projetant cette équation vectorielle dans le repère spatial associé au référentiel, on obtient 3 équations scalaires.
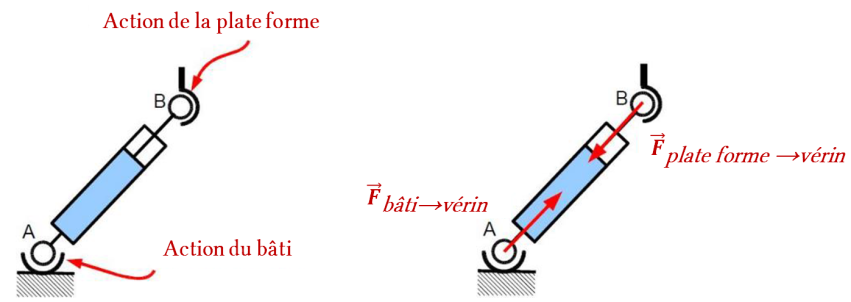
Exemple : Bride hydraulique
En considérant le problème plan dans le plan
 , on peut simplifier les torseur de chacune des actions mécaniques extérieures à la bride 1:
, on peut simplifier les torseur de chacune des actions mécaniques extérieures à la bride 1:
action mécanique du piston 2→ 1 :
 (pas de modification)
(pas de modification)action mécanique de 3 → 1 :
 (pas de modification)
(pas de modification)
action mécanique de 4 → 1 :
 (pas de modification)
(pas de modification)
action mécanique du bâti 0→ 1 en O :
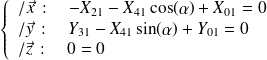
Théorème de la résultante statique appliqué à la bride 1 :
Si
 est en équilibre dans le référentiel
est en équilibre dans le référentiel
 supposé galiléen, alors :
supposé galiléen, alors :
Par projection dans la base
 liée à
liée à
 , on obtient :
, on obtient :
Théorème du moment statique appliqué à la bride 1 en O :
Si
est en équilibre dans le référentiel
 supposé galiléen, alors :
supposé galiléen, alors :
Par projection dans la base
liée à
, on obtient :
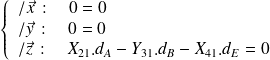
Conclusions :
L'équation issue du TMS appliqué à la bride 1 en O nous donne une relation entrée-sortie en effort. On peut ici donner l'expression de l'effort recherché du vérin sur la bride en fonction de l'effort de serrage
 imposé en B :
imposé en B :
On remarque que les équations issue du TRS appliqué à la bride 1 permettent de déterminer les inconnues de liaison en O :
 et
et
 . Ces données permettraient par exemple, dans le cadre d'une étude de conception de choisir et de dimensionner les composants participant à la réalisation de la liaison pivot d'axe
. Ces données permettraient par exemple, dans le cadre d'une étude de conception de choisir et de dimensionner les composants participant à la réalisation de la liaison pivot d'axe
 .
.
Cas d'un solide en équilibre soumis à deux glisseurs - Application graphique
Soit S un système matériel en équilibre soumis à deux glisseurs :
|  |
Appliquons le PFS à {S} :
Théorème de la résultante statique appliqué à S :

 les deux forces ont même direction, même norme et sont de sens opposés.
les deux forces ont même direction, même norme et sont de sens opposés.
Théorème du moment statique appliqué à S au point A :

Or
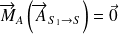 et
et
Donc

Ainsi,
 est colinéaire à
est colinéaire à
 et donc
a pour support la droite
et donc
a pour support la droite
 .
.
Enfin, comme
 ,
,
 a également pour support la droite
.
a également pour support la droite
.
Fondamental :
Si un système matériel soumis à deux glisseurs en A et B est en équilibre alors, les résultantes :
ont même support : la droite
;
ont même norme ;
sont de sens opposés.
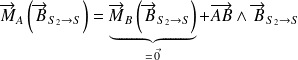
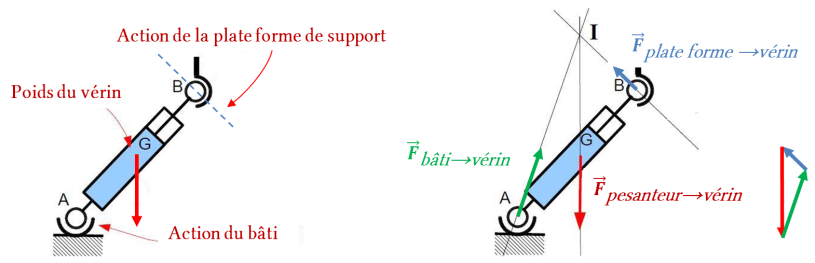
Exemple : équilibre d'un vérin de l'hexapode (version hydraulique), poids négligé
Cas d'un solide en équilibre soumis à trois glisseurs - Application graphique
Pour résoudre le cas de l'équilibre d'un système soumis à 3 glisseurs, il faut connaître au minimum :
une force entièrement (direction, sens et norme) ;
le support d'une des deux autres forces.
Ainsi vous êtes en mesure de distinguer deux cas :
si les deux directions connues ne sont pas parallèles, alors on se trouve dans le cas général d'un système soumis à 3 forces non parallèles.
si les deux directions connues sont parallèles, alors la troisième force est nécessairement parallèle aux deux autres et on se trouve dans le cas particulier d'un système soumis à 3 forces parallèles
Cas d'un solide en équilibre soumis à trois glisseurs non parallèles
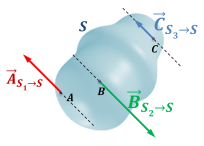
Soit S un système matériel en équilibre soumis à trois glisseurs :
de la part d'un solide
 appliqué au point A :
appliqué au point A :
de la part d'un solide
 appliqué au point B :
appliqué au point B :
de la part d'un solide
 appliqué au point C :
appliqué au point C :
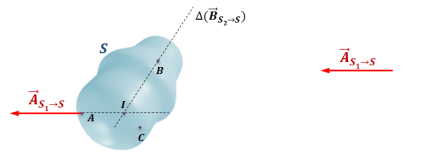
Appliquons le PFS à {S} :
Théorème de la résultante statique appliqué à S :
 la somme vectorielle des 3 forces est nulle : elles sont coplanaires et le triangle des forces est fermé.
la somme vectorielle des 3 forces est nulle : elles sont coplanaires et le triangle des forces est fermé.
Théorème du moment statique appliqué à S au point I, point d'intersection des supports de
et de
: 
Or
 puisque I se trouve sur les supports de
et de
.
puisque I se trouve sur les supports de
et de
.Ainsi,

Donc
 et
et
 sont colinéaires
sont colinéairesDonc le support de
 passe aussi par le point I
passe aussi par le point IDonc les supports des 3 forces sont concourants.
Fondamental :
Si un système matériel est en équilibre sous l'action de glisseurs (de résultantes non parallèles), alors les résultantes de ces glisseurs sont :
concourantes (leurs supports se coupent en un même point) ;
coplanaires ;
de somme vectorielle nulle (le triangle des forces est fermé).
Remarque : Application graphique
Connaissant une force entièrement et le support d'une seconde force, il est possible de construire le triangle des forces (ou dynamique) et de déterminer complètement et graphiquement les trois forces.
Exemple : équilibre d'un vérin de l'hexapode (version hydraulique), poids non négligé
Cas d'un solide en équilibre soumis à trois glisseurs (3 forces) parallèles
Fondamental :
Si un système matériel est en équilibre sous l'action de glisseurs (de résultantes parallèles), alors les résultantes de ces glisseurs sont :
|  |
Dans ce cas, il convient d'utiliser une méthode de résolution analytique consistant, selon les données de l'énoncé, à appliquer le TRS et/ou le TMS en un point judicieusement choisi.




