


Principe fondamental de la Statique
Fondamental : Enoncé du Principe Fondamental de la Statique (PFS)
Si un système matériel S est en équilibre par rapport à un référentiel
|  |


Remarque :
Attention, la réciproque est fausse : le fait que le torseur des actions mécaniques extérieures à un système matériel soit nul n'implique pas que le système matériel soit à l'équilibre.
Le PFS se traduit par deux équations vectorielles (voir l'exemple ci-après).
Exemple : Bride hydraulique
Principe fondamental de la statique appliqué à la bride 1 en O :
Si
 est en équilibre dans le référentiel
est en équilibre dans le référentiel
 supposé galiléen, alors :
supposé galiléen, alors :

On obtient ainsi les 2 équations vectorielles suivantes :


Théorème de la résultante statique
Fondamental : Théorème de la résultante statique appliqué à S
Remarque :
En projetant cette équation vectorielle dans le repère spatial associé au référentiel, on obtient 3 équations scalaires.
Exemple : Bride hydraulique
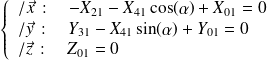
Théorème de la résultante statique appliqué à la bride 1:
Si
est en équilibre dans le référentiel
 supposé galiléen, alors :
supposé galiléen, alors :
Par projection dans la base
 associée à
associée à
 , on obtient :
, on obtient :
Théorème du moment statique
Fondamental : Théorème du moment statique appliqué à S au point P
Remarque :
De même, en projetant cette équation vectorielle dans le repère spatial associé au référentiel, on obtient 3 équations scalaires.
Attention :
Ne pas oublier de toujours bien préciser le point choisi pour l'application du théorème du moment statique.
Exemple : Bride hydraulique
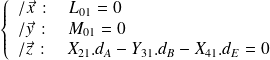
Théorème du moment statique appliqué à la bride 1 en O :
Si
est en équilibre dans le référentiel
supposé galiléen, alors :
Par projection dans la base
associée à
, on obtient :
Complément sur la notion de référentiel galiléen
Définition :
On appelle référentiel galiléen un référentiel dans lequel le PFS est vérifié.
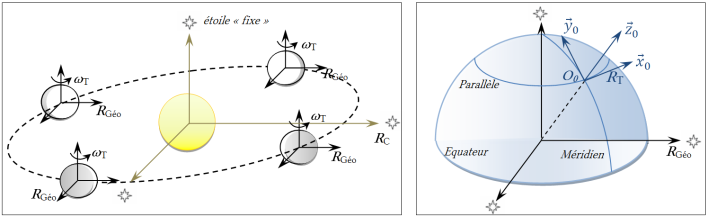
La notion de référentiel galiléen est absolue, c'est à dire que le repère spatial est considéré comme "fixe" par rapport à l'ensemble de l'Univers au cours du temps. En toute rigueur, un tel référentiel n'existe pas.
Cependant, pour les systèmes étudiés, il pourra être admis que les référentiels suivants restent de bonnes approximations de référentiels galiléens :
Type de référentiel | Origine | Axes | Validité |
|---|---|---|---|
Référentiel de Copernic | Centre de masse du système solaire (proche de celui du Soleil) | Dirigés vers 3 étoiles fixes |
|
Référentiel géocentrique (ou de Foucault) | Centre de masse de la Terre | Dirigés vers 3 étoiles fixes |
|
Référentiel terrestre (ou du laboratoire) | Lié à la surface terrestre | Fixes par rapport à la Terre |
|



Remarque :
Tout repère animé d'un mouvement de translation rectiligne uniforme par rapport à un référentiel galiléen est également galiléen.




